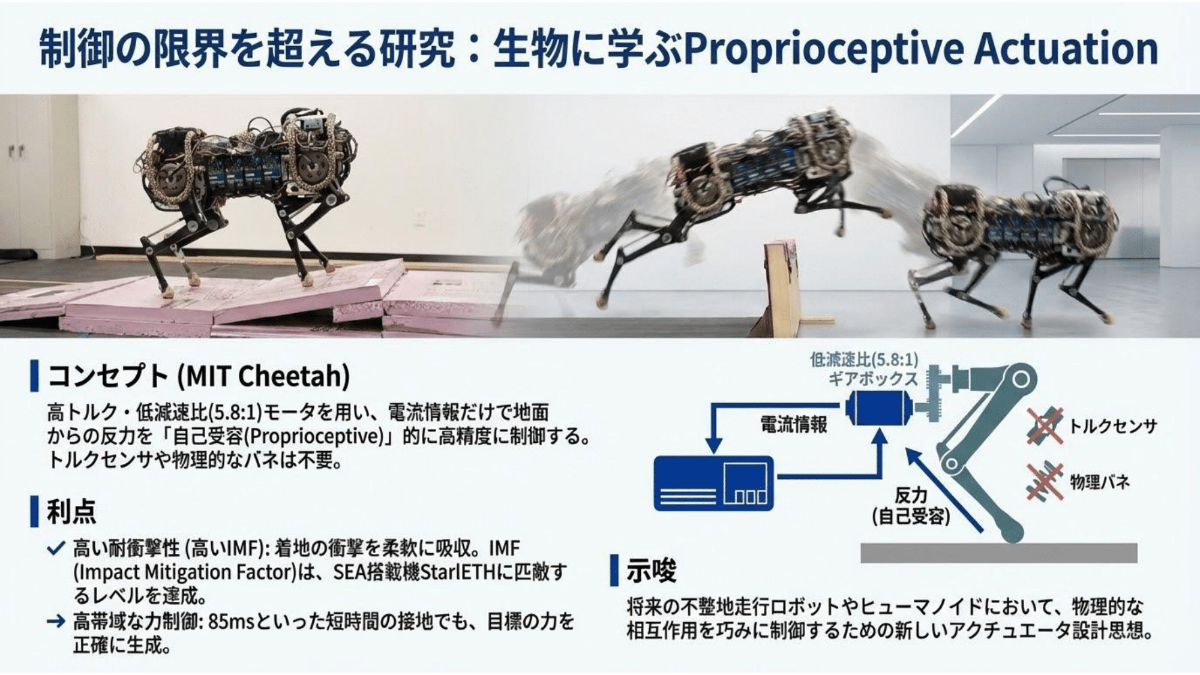
MIT Cheetahの高トルク・低減速比モータを用いた、電流情報だけで地面からの反力を自己受容的に高精度制御する革新的なアクチュエータ設計思想について解説した技術資料です。
貴社の課題に合わせた技術資料・プレゼン資料を作成いたします。お気軽にお問い合わせください。